2024开源操作系统训练营 rCore Chapter3练习
编程作业
思路
rCore 的第一个实验,主要是为了熟悉如何进行内核编程,实现起来比较简单。
要求实现一个系统调用,填充传入的 TaskInfo 结构体已获取当前任务的一些信息,包含三个字段:任务状态、任务使用的系统调用及调用次数、系统调用时刻距离任务第一次被调度时刻的时长(单位 ms)。
首先是任务状态,这个比较简单,直接查看当前任务的任务控制块的字段值即可。
对于系统调用次数,可以在任务控制块中添加新的字段来存储相关信息,例如按提示所说,一个长度为 MAX_SYSCALL_NUM 的整型数组。在函数 syscall/mod.rs:syscall 中,在内核对用户态传入的系统调用号进行分发处理前,增加对应的系统调用桶的计数。注意,由于本次系统调用 sys_task_info 也要进行计数,因此不能在执行了特定的系统调用后再来增加计数,否则本次 sys_task_info 系统调用次数将无法被统计。
最后是距离任务第一次被调度时刻的时长,一种实现方式是:为任务控制块添加新的字段:time,表示任务第一次被调度的时间。先为 time 设定一个初始值(例如 0),表示该值未被更改过,每当一个任务即将被调度时(如 TASK_MANAGER.run_next_task() 进行任务切换时),查看 time 值,判断是否未被更改:如果是,则赋予当前时间;否则,不做任何操作。这样,就成功保存了任务初次被调度的时刻。在调用 sys_task_info 时,将当前时间减去保存的初次被调度时间,即为时长,注意单位为毫秒。
代码
由于代码是直接在原项目代码的基础上进行修改,因此为了查看方便,本次及之后实验的代码将以 git diff 的形式展现,加号(绿色)代表添加的代码,减号(红色)代表删除的代码。
diff --git a/os/src/syscall/mod.rs b/os/src/syscall/mod.rs
index e6e8f98..7f63ed6 100644
--- a/os/src/syscall/mod.rs
+++ b/os/src/syscall/mod.rs
@@ -26,8 +26,13 @@ mod process;
use fs::*;
use process::*;
+
+use crate::task::inc_syscall_times;
+
/// handle syscall exception with `syscall_id` and other arguments
pub fn syscall(syscall_id: usize, args: [usize; 3]) -> isize {
+ // increase syscall times before handle specific syscall
+ inc_syscall_times(syscall_id);
match syscall_id {
SYSCALL_WRITE => sys_write(args[0], args[1] as *const u8, args[2]),
SYSCALL_EXIT => sys_exit(args[0] as i32),
diff --git a/os/src/syscall/process.rs b/os/src/syscall/process.rs
index f1cd424..8d01cf4 100644
--- a/os/src/syscall/process.rs
+++ b/os/src/syscall/process.rs
@@ -1,8 +1,9 @@
//! Process management syscalls
+
use crate::{
config::MAX_SYSCALL_NUM,
- task::{exit_current_and_run_next, suspend_current_and_run_next, TaskStatus},
- timer::get_time_us,
+ task::{exit_current_and_run_next, get_current_tcb, suspend_current_and_run_next, TaskStatus},
+ timer::{get_time_ms, get_time_us},
};
#[repr(C)]
@@ -53,5 +54,19 @@ pub fn sys_get_time(ts: *mut TimeVal, _tz: usize) -> isize {
/// YOUR JOB: Finish sys_task_info to pass testcases
pub fn sys_task_info(_ti: *mut TaskInfo) -> isize {
trace!("kernel: sys_task_info");
- -1
+ let cur_tcb = get_current_tcb();
+ // labour in vain! The status must be Running
+ let status = cur_tcb.task_status;
+ let syscall_times = cur_tcb.syscall_times;
+ let time = get_time_ms() - cur_tcb.time;
+
+ unsafe {
+ *_ti = TaskInfo {
+ status,
+ syscall_times,
+ time,
+ }
+ }
+
+ 0
}
diff --git a/os/src/task/mod.rs b/os/src/task/mod.rs
index c1636ef..4a14e2f 100644
--- a/os/src/task/mod.rs
+++ b/os/src/task/mod.rs
@@ -14,9 +14,11 @@ mod switch;
#[allow(clippy::module_inception)]
mod task;
-use crate::config::MAX_APP_NUM;
+
+use crate::config::{MAX_APP_NUM, MAX_SYSCALL_NUM};
use crate::loader::{get_num_app, init_app_cx};
use crate::sync::UPSafeCell;
+use crate::timer::get_time_ms;
use lazy_static::*;
use switch::__switch;
pub use task::{TaskControlBlock, TaskStatus};
@@ -54,6 +56,8 @@ lazy_static! {
let mut tasks = [TaskControlBlock {
task_cx: TaskContext::zero_init(),
task_status: TaskStatus::UnInit,
+ syscall_times: [0u32; MAX_SYSCALL_NUM],
+ time: 0usize,
}; MAX_APP_NUM];
for (i, task) in tasks.iter_mut().enumerate() {
task.task_cx = TaskContext::goto_restore(init_app_cx(i));
@@ -122,6 +126,11 @@ impl TaskManager {
let mut inner = self.inner.exclusive_access();
let current = inner.current_task;
inner.tasks[next].task_status = TaskStatus::Running;
+ // if the task is being called for the first time,
+ if inner.tasks[next].time == 0usize {
+ // then set it to the current time
+ inner.tasks[next].time = get_time_ms();
+ }
inner.current_task = next;
let current_task_cx_ptr = &mut inner.tasks[current].task_cx as *mut TaskContext;
let next_task_cx_ptr = &inner.tasks[next].task_cx as *const TaskContext;
@@ -135,6 +144,24 @@ impl TaskManager {
panic!("All applications completed!");
}
}
+
+ /// Get task control block
+ pub fn get_current_tcb(&self) -> TaskControlBlock {
+ let inner = self.inner.exclusive_access();
+ let current = inner.current_task;
+ inner.tasks[current].clone()
+ }
+
+ /// increase syscall times
+ pub fn inc_syscall_times(&self, syscall_id: usize) -> bool {
+ if syscall_id >= MAX_SYSCALL_NUM {
+ return false;
+ }
+ let mut inner = self.inner.exclusive_access();
+ let current = inner.current_task;
+ inner.tasks[current].syscall_times[syscall_id] += 1;
+ true
+ }
}
/// Run the first task in task list.
@@ -169,3 +196,13 @@ pub fn exit_current_and_run_next() {
mark_current_exited();
run_next_task();
}
+
+/// Get current task control block
+pub fn get_current_tcb() -> TaskControlBlock {
+ TASK_MANAGER.get_current_tcb()
+}
+
+/// increase syscall times
+pub fn inc_syscall_times(syscall_id: usize) -> bool {
+ TASK_MANAGER.inc_syscall_times(syscall_id)
+}
\ No newline at end of file
diff --git a/os/src/task/task.rs b/os/src/task/task.rs
index e6580c9..4e4c19b 100644
--- a/os/src/task/task.rs
+++ b/os/src/task/task.rs
@@ -1,6 +1,7 @@
//! Types related to task management
use super::TaskContext;
+use crate::config::MAX_SYSCALL_NUM;
/// The task control block (TCB) of a task.
#[derive(Copy, Clone)]
@@ -9,6 +10,10 @@ pub struct TaskControlBlock {
pub task_status: TaskStatus,
/// The task context
pub task_cx: TaskContext,
+ /// The syscall times
+ pub syscall_times: [u32; MAX_SYSCALL_NUM],
+ /// The first time the task was scheduled
+ pub time: usize,
}
/// The status of a task
time的设置有一点小 bug,就是第一个被调度任务的time应该在run_first_task中设置,否则它的time将会晚一个调度周期,testcase 没测出来。。。写博客时才注意到,懒得改了😓
问答作业
t1
Q: 正确进入 U 态后,程序的特征还应有:使用 S 态特权指令,访问 S 态寄存器后会报错。 请同学们可以自行测试这些内容(运行 三个 bad 测例 (ch2b_bad_*.rs) ), 描述程序出错行为,同时注意注明你使用的 sbi 及其版本。
A: 略。
t2
深入理解 trap.S 中两个函数 __alltraps 和 __restore 的作用,并回答如下问题:
Q1: L40:刚进入 __restore 时,a0 代表了什么值。请指出 __restore 的两种使用情景。
A1: a0 代表了内核栈的栈指针,即 __alltraps 保存的上下文的首地址。
情景一:表示内核第一次从内核态切换到用户态(或者说将 CPU 所有权转交给用户程序),在初始化或加载应用程序时,内核通过 __restore 恢复必要的状态。
情景二:当 call trap_handler 执行结束后,程序计数器指向它的下一条指令,即 __restore 的起始地址,表示 Trap 处理完成,将恢复 Trap 时的上下文状态,返回用户态。
Q2: L43-L48:这几行汇编代码特殊处理了哪些寄存器?这些寄存器的的值对于进入用户态有何意义?请分别解释。
ld t0, 32*8(sp)
ld t1, 33*8(sp)
ld t2, 2*8(sp)
csrw sstatus, t0
csrw sepc, t1
csrw sscratch, t2A2: 特殊处理了 t0、t1、t2、sstatus、sepc、sscratch 寄存器。
t0、t1、t2 用来暂存从内核栈中读取的之前保存的 CSR 寄存器的值,再使用 csrw 指令将暂存值写入对应的 CSR 寄存器中。
其中 sstatus 的 SPP 字段给出 Trap 发生之前 CPU 处在哪个特权级等信息,sepc 当 Trap 是异常时(exception)记录之前执行的最后一条指令地址,sscratch 则存储着用户栈的栈指针,用于在 sret 返回用户态前使用 csrrw 指令将当前栈指针从内核栈切换到用户栈。
Q3: L50-L56:为何跳过了 x2 和 x4?
ld x1, 1*8(sp)
ld x3, 3*8(sp)
.set n, 5
.rept 27
LOAD_GP %n
.set n, n+1
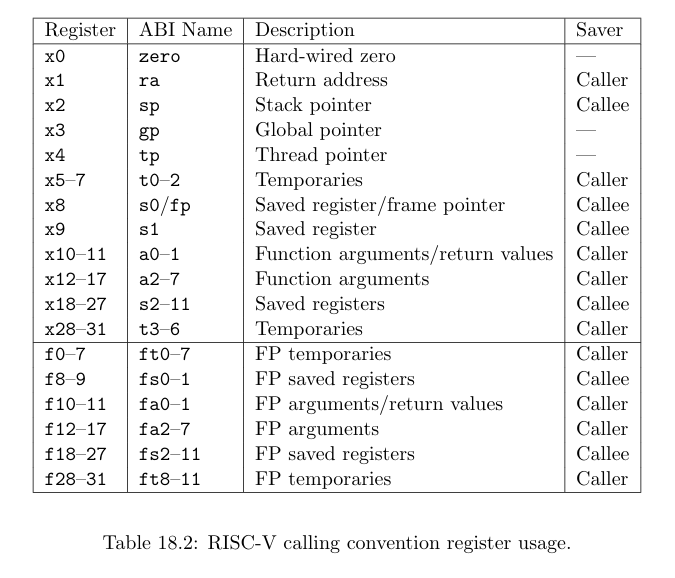
.endrA3: 如下图所示,x2 即 sp 寄存器,保存了内核栈的栈指针。而 x4 寄存器为线程寄存器,在本实验中不会用到。
Q4: L60:该指令之后,sp 和 sscratch 中的值分别有什么意义?
csrrw sp, sscratch, spA4: 该指令的作用是先将 sscratch 的值读取到 sp 中,再将 sp 的值写入 sscratch 中,这两个操作是在同一周期内完成的,无需中间寄存器的参与,作用相当于 swap(sp, sscratch). 在返回用户态之前交换 sp 和 sscratch 的值,即将当前栈指针由用户栈切换到内核栈。
Q5: __restore:中发生状态切换在哪一条指令?为何该指令执行之后会进入用户态?
A5: 状态切换发生在 sret,该指令会负责从栈中恢复之前保存的程序计数器值,并更新特权级相关的寄存器(如 mstatus)。
Q6: L13:该指令之后,sp 和 sscratch 中的值分别有什么意义?
csrrw sp, sscratch, spA6: 与 L60 相反,作用是将当前栈指针由内核栈切换到用户栈,便于后续的 Trap 处理。
Q7: 从 U 态进入 S 态是哪一条指令发生的?
A7: 根据 Trap 的类型不同而定。对于系统调用而言,是 ecall 指令,对于其它的异常情况(如非法操作、页面缺失等)则是在硬件检测到后自动触发异常,从而进入内核态。
 微信
微信 支付宝
支付宝